下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

| 一、设计思路 | |||
| 设计目的: | 利用激光切割技术,对玻璃液晶显示屏四周圆角切割和其它异形孔切割 | ||
| 设定场景: | 3C行业玻璃激光切割。选用皮秒激光器,波长1064nm,对玻璃四个角倒圆角,水滴孔切割。相机对产品Mark拍照后计算产品X/Y轴位置,切割头X轴和载台Y轴补偿产品位置偏差后做插补运动对产品圆弧角做精确切割 | ||
| 动作流程: |
1、玻璃通过上料机来料 | ||
| 2、相机对玻璃正面进行Mark精定位 | |||
| 3、激光在玻璃正面切割四周圆角和水滴孔 | |||
| 4、翻转机构将玻璃翻面使玻璃反面朝上 | |||
| 5、相机对玻璃反面进行Mark精定位 | |||
| 6、激光在玻璃反面切割四周圆角和水滴孔 | |||
| 7、玻璃流入下一个工序 | |||
| 8、循环以上动作 | |||
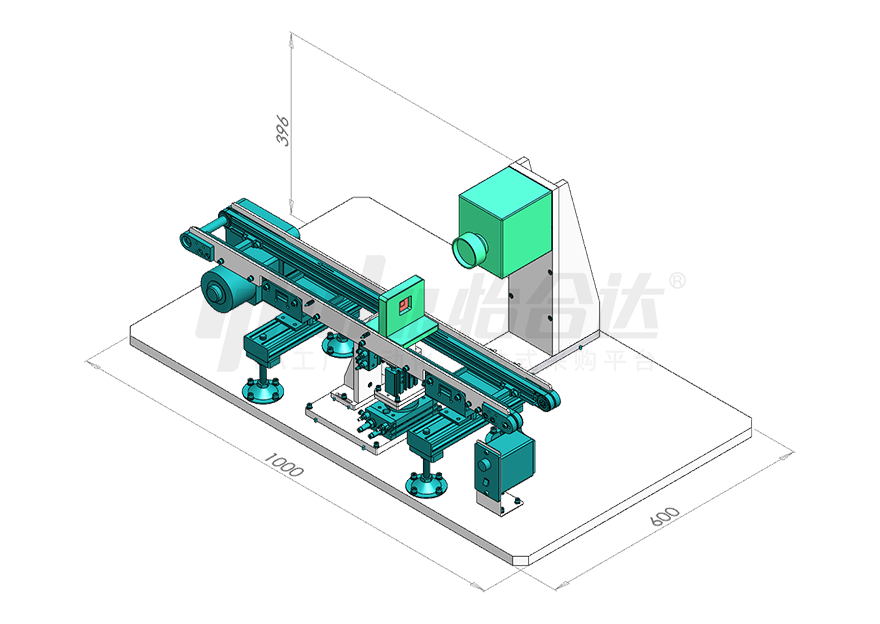
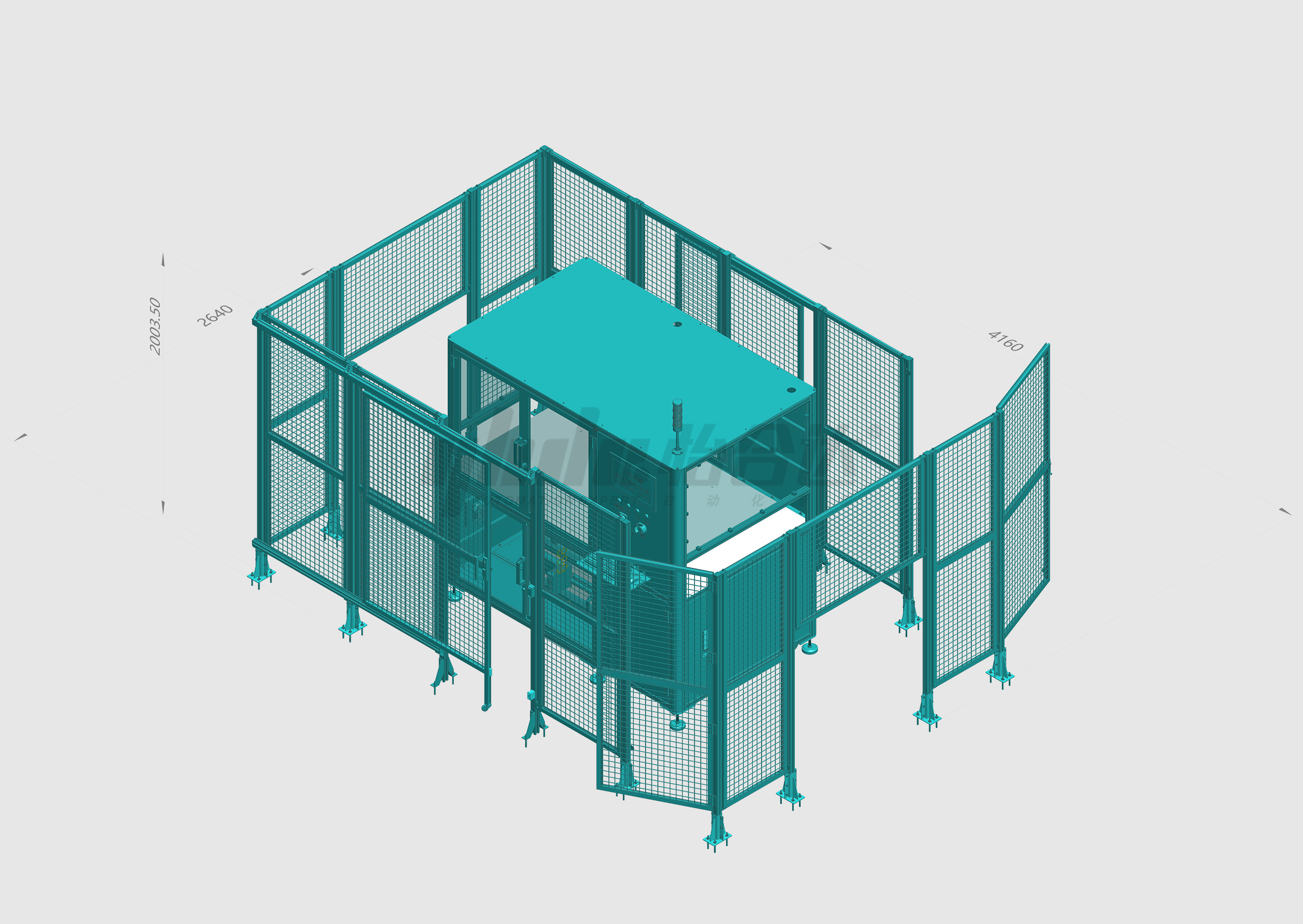
| 二、机构参数 | |||
| 外形尺寸: | L1627xW1300xH874(mm) | ||
| 通用性: | 3-8寸 | ||
| 循环周期: | 4.5(S) | ||
| 精度: | ±0.05(mm) | ||
| 三、示例应用 | |||
| 工件形状: | 矩形 | ||
| 工件尺寸: | L140xW76xH1(mm) | ||
| 工件重量: | 1(Kg) | ||
| 使用气压: | P=0.5(MPa) | ||
| 电源: | AC220V 50Hz/DC24V | ||
| 四、计算过程 | |||
| 注:选型计算&公式可下载技术文档进行详细查看 | |||
【翻转步进电机选型计算】  |
|||
| 参数 | 公式&注解 | 取值 | |
| 1)、机械结构参数 | |||
| 翻转最大直径(m): | D | 0.076 | |
| 每次转动角度( °): | θ | 180 | |
| 每次转动的时间(s): | t1 | 0.6 | |
| 电机加减速时间(s): | t2 | 0.2 | |
| 转动负载总质量(Kg): | M | 0.2 | |
| 减速比: | i | 1 | |
| 安全系数: | K | 2 | |
| 选型电机型号(YSD256-HB4-E) | |||
| 选型电机扭矩(N·m): | TP | 1.2 | |
| 选型电机惯量(kg·m²): | J电机 | 0.00002 | |
| 2)、计算惯量和转矩 | |||
| 角速度(rad/s): | ω=θ*π/180/t1 | 5.23 | |
| 转速(rpm): | N=ω*30/π | 50 | |
| 电机所需转速(rpm): | N电机=N*I | 50 | |
| 负载转动惯量(kg·m²): | J=1/8*M*D² | 0.0001444 | |
| 风车角加速度(rad/s²): | α=ω/t2 | 26.2 | |
| 电机轴必须转矩(N·m): | T=J*α*K/i | 0.008 | |
| 惯量比: | J/i² /J电机 | 7.22 | |
| 整体设计工况计算: (此结论仅此案例参考使用) |
案例所需最大扭矩0.008Nm<实际电机扭矩1.2Nm | ||
| 案例负载转动惯量与电机惯量比<10,因此电机符合设计要求。 | |||
| 【主要标准件选型计算】 | |||
| 1)、单轴机器人 | |||
| 以下参考怡合达FA工厂自动化零件 选型技术资料(表1) | |||
| YCBSC17-40-1250-BR-M-40-N-C-4 水平使用负载35Kg | |||
| 整体设计工况计算 | |||
| 单轴机器人35Kg >10Kg | |||
| 案例所需负载为10Kg,实际负载为35Kg,因此符合当前设计要求。 | |||