下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

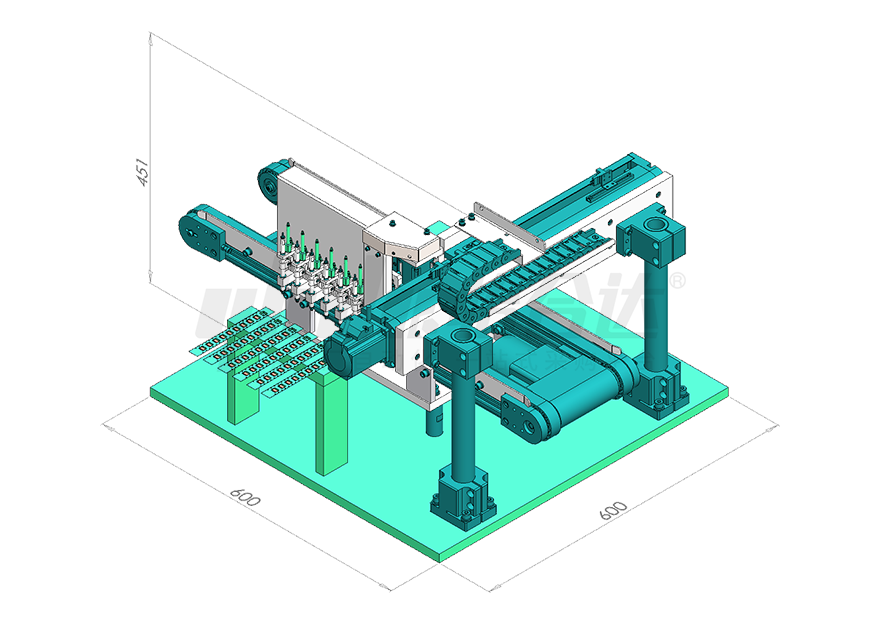
| 一、设计思路 | |||
| 设计目的: | 机械手移栽产品保持产品姿态不变 | ||
| 设定场景: | 样品在移栽(旋转移栽)过程中保持原有的角度不变 |
||
| 动作流程: |
1、机械手夹具下降,夹取主输送线物料后上升 | ||
| 2、机械手摆臂旋转90度,夹具下降将物料放在左、右两边输送线上 | |||
| 3、循环以上动作 | |||
| 4、四指夹爪上升、回位,循环以上动作 | |||
| 5、循环以上动作 | |||
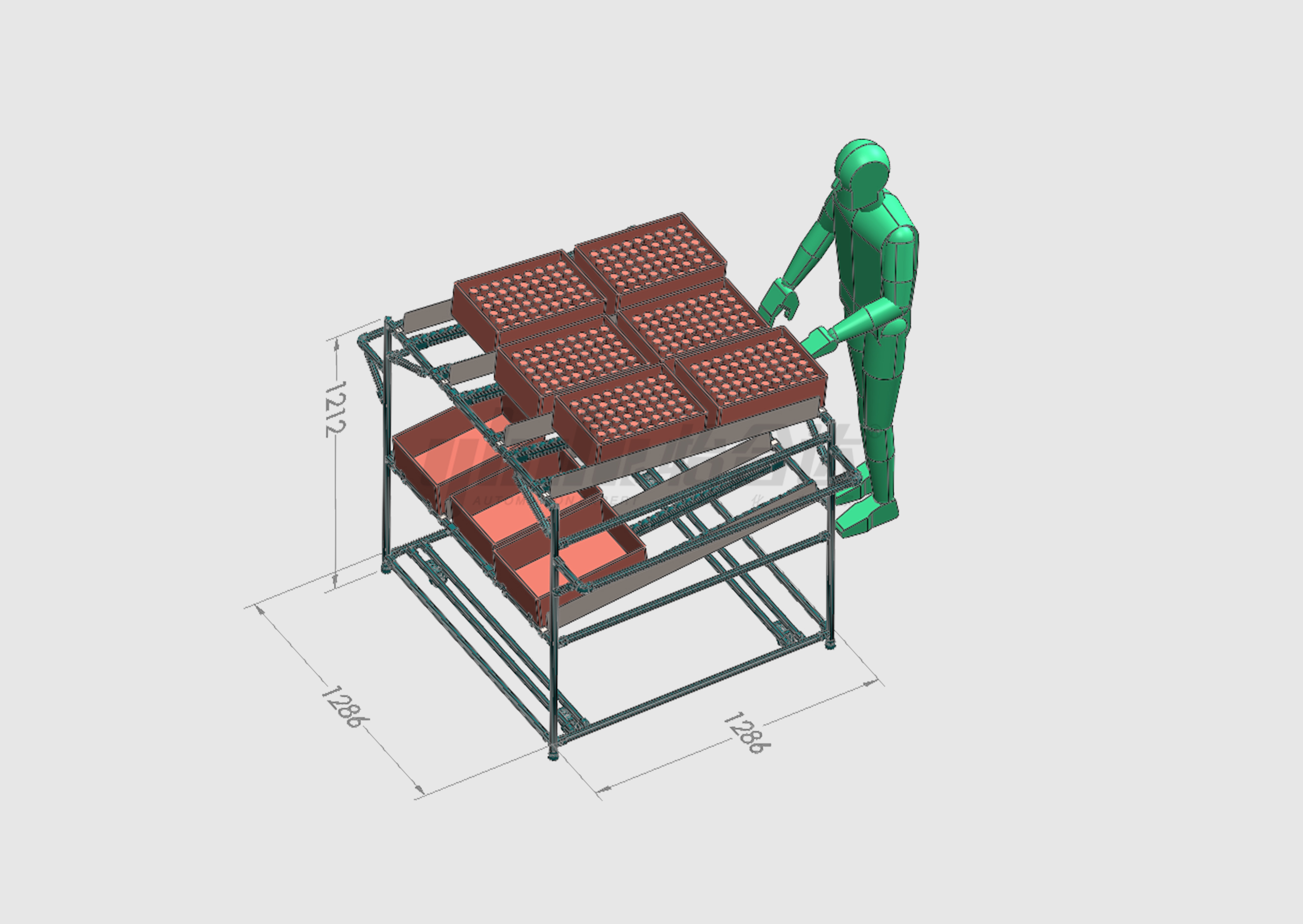
| 二、机构参数 | |||
| 外形尺寸: | L1148xW800xH617(mm) | ||
| 通用性(单个样品负载): | 负载3kg以内物料,适用于夹爪夹料 | ||
| 循环周期: | 3(S) | ||
| 精度: | ±0.5(mm) | ||
| 三、示例应用 | |||
| 工件形状: | 长方形 | ||
| 工件尺寸: | 40*36*20mm | ||
| 工件重量: | 0.2(g) | ||
| 使用气压: | P=0.5(MPa) | ||
| 电源: | AC220V 50Hz/DC24V | ||
| 四、计算过程 | |||
| 注:选型计算&公式可下载技术文档进行详细查看 | |||
| 【伺服电机选型计算】 | |||
| 机械手旋转角度: |
θ=π/2(rad) | ||
| 机械手旋转π/2所用时间: | t0=1(s) | ||
| 机械手加、减速时间: | t1=0.5(s) | ||
| 机械手最大速度: | ω=2θ/t0=π(rad/S) | ||
| 机械手加速度: | ε=ω/t1=2π(rad/S²) | ||
| 负载转动惯量: | J=993.4(kg*cm²) (查技术文档表一得) | ||
| 负载加速转矩: | T=J*ε/10000=0.6329(NM) | ||
| 安全系数: | s=2 | ||
| 忽略摩擦转矩,得到总转矩: | T0=T*S=1.2477(NM) | ||
| 选择电机: | MHMF082L1U2M(750w) | ||
| 所选电机扭矩: | 2.4(NM) | ||
| 所选电机转子惯量: | J1=1.56(kg*cm²) | ||
| 所选减速机减速比: | i=20 | ||
| 减速机效率: | η=0.95 | ||
| 负载转矩这算到电机端转矩: | T2=T0/i/η=0.0657(NM)<2.4(NM) | ||
| 负载惯量折算到电机惯量: | J2=J/i²=2.4835(kg*cm²) | ||
| 负载惯量折算后与电子转子惯量比: | J2/J1=1.59<5 | ||
| 综上计算,电机力矩和惯量都满足要求。 | |||
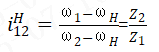
| 【太阳轮、行星轮齿数计算】 | |||
| 设定太阳轮(大轮)齿数:Z1 | 设定太阳轮(大轮)转速:ω1 | ||
| 设定行星轮(小轮)齿数:Z2 | 设定行星轮(小轮)转速:ω1 | ||
| 设定行星架转速:ωH | 转换轮系比轮1与轮2的速比: |
||
| 已知:ω1=0,ω2=0(夹具、物料时刻保持姿态不变) | |||
 |
|||
| 由以上公式得出Z2/Z1=1,即Z1=Z2,再根据结构空间尺寸要求,设定Z1=Z2=36齿。可查看表2理解 | |||
| 还可以以另一种思路去理解这个问题,把太阳轮、行星轮以及连接的行星架单独拿出来,这就是一套完整的同步轮同步带系统,具备两个同步轮旋转方向相同,传动比按照齿数反比的定律;再依据案例现有机构太阳轮不动,行星架旋转一定角度,从运动系统相对性来说等效于行星架不动,太阳轮逆行星架转向旋转相同角度,行星轮旋转方向与太阳轮相同,行星轮旋转角度由与太阳轮的齿数比确定。本案例要求行星架旋转90°,物料姿态保持不变,假想没有行星轮系统,物料随着摆臂转90°后,物料需要以什么样的方向、旋转多少角度才能回到搬运前的位置,很容易得出来以逆摆臂方向旋转同样的90°才能能回到原先位置,根据前面分析,得出太阳轮与行星轮齿数比是1:1。 | |||