


 下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动
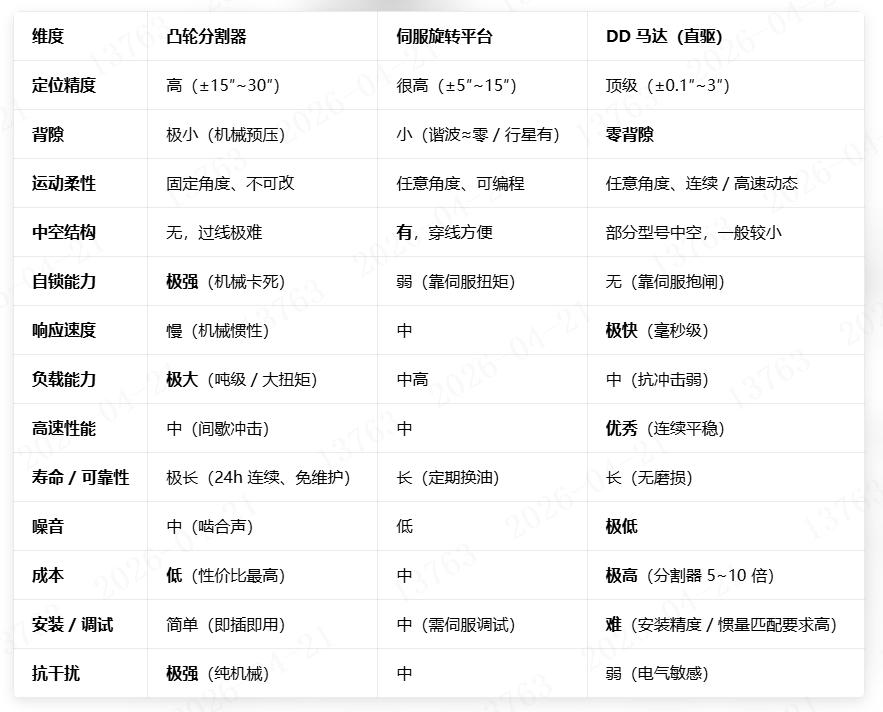
三种产品均为自动化领域核心旋转分度 / 驱动装置,但原理、精度、柔性、成本、适用场景差异极大。核心结论:
固定工位、重载、低成本选凸轮分割器;
任意角度、中空过线、中高精度选中空旋转平台;
顶级精度、高响应、高速动态选 DD 马达。
一、核心原理对比
1. 凸轮分割器(机械间歇分度)
原理:弧面凸轮 + 滚针分度盘纯机械结构。输入轴连续旋转→凸轮曲线段驱动分度盘转固定角度(分度)→凸轮直线段使输出轴机械自锁、完全静止。运动规律由凸轮轮廓硬件决定,不可更改。
2. 伺服旋转平台(伺服 + 减速 + 中空)
原理:伺服电机 + 谐波 / 行星减速器 + 交叉滚子轴承 + 中空转盘。伺服闭环控制→减速器增扭减速→驱动转盘360° 任意角度定位。中心通孔可穿线 / 气管 / 光纤。
3. (直驱力矩电机)DD 马达
原理:无减速器、无传动链,电机转子直接连接负载。电磁直驱、编码器闭环反馈→零背隙、毫秒级响应、360° 连续 / 分度。电机 = 负载,无中间环节。
二、选型条件(什么场景选哪种)
优先选 凸轮分割器:
固定工位、角度不可变(如 4/6/8 工位转盘设备)
重载、大负载、大惯量(负载 > 500kg、转盘直径 > 1m)
24 小时连续运转、高节拍、高可靠性
低成本、极简维护、耐粉尘油污
断电需自锁、不晃位(如装配 / 检测 / 包装转盘)
典型场景:多工位装配台、激光打标转盘设备、食品 / 医药包装机、自动换刀机构
优先选 伺服旋转平台:
任意角度定位、柔性换产(角度可编程、频繁改工位)
必须中空过线 / 过气管 / 光纤(避免缠绕)
精度要求较高(±5″~15″)、中等负载
需摇摆、连续旋转、分度复合运动
性价比优先、替代分割器实现柔性化
典型场景:视觉对位、精密点胶、激光旋转轴、半导体检测、机器人关节、3C 装配
优先选 DD 马达:
顶级定位精度(±3″内)、零背隙
极高动态响应、高速启停、连续旋转
无传动误差、超精密轨迹 / 轮廓控制
低噪音、低振动、高洁净度(半导体 / 医疗)
预算充足、追求顶级性能
典型场景:半导体晶圆台、光刻机、精密数控转台、OLED 面板检测、高端机器人关节
三、选型口诀(快速记忆)
固定工位、重载、低成本、要自锁 → 凸轮分割器
任意角度、中空过线、柔性换型 → 伺服旋转平台
顶级精度、高响应、高速动态 → DD 马达
四、关键选型误区
误区:精度越高越好 → 纠正:够用即可,分割器已满足 90% 标准工位;盲目上 DD 会大幅超预算。
误区:伺服平台可完全替代分割器 → 纠正:超大负载 / 24h 连续 / 强自锁场景,分割器更可靠。
误区:DD 马达负载能力强 → 纠正:DD 抗冲击弱,严禁过载 / 撞击。
误区:中空 = DD → 纠正:伺服平台中空更实用、成本更低;DD 中空一般较小。
 2026-04-22 17:40:14
2026-04-22 17:40:14写的很好!很赞






