下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

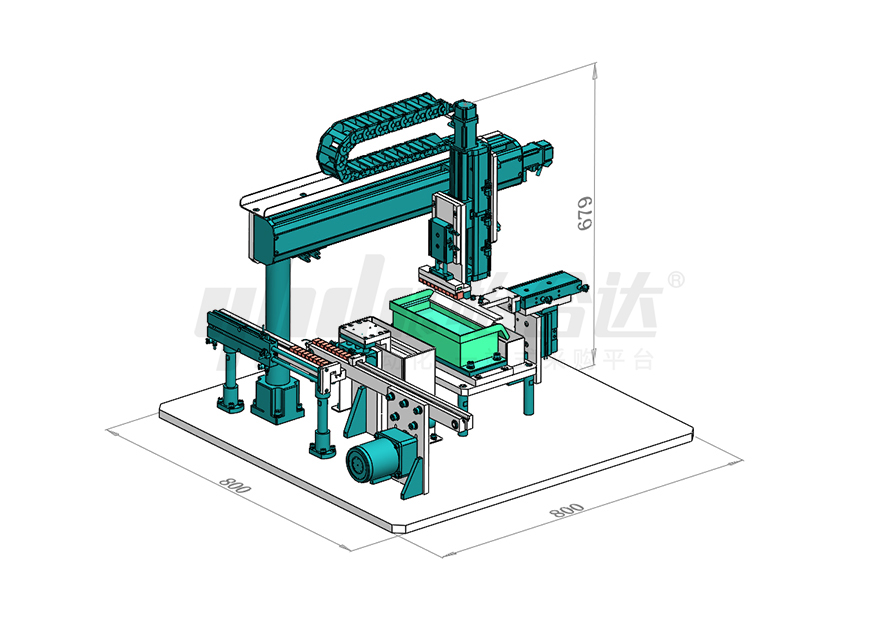
| 一、设计思路 | ||
| 设计目的: | 使用可多点定位的三倍行程伸缩机构将受限A空间位置的工件搬运至受限B空间 | |
| 位置。 | ||
| 设定场景: | 适用于物流仓储、制造业搬运或堆垛物料等场景(例如用于“立体仓伸缩货叉 ” | |
| 搬运) | ||
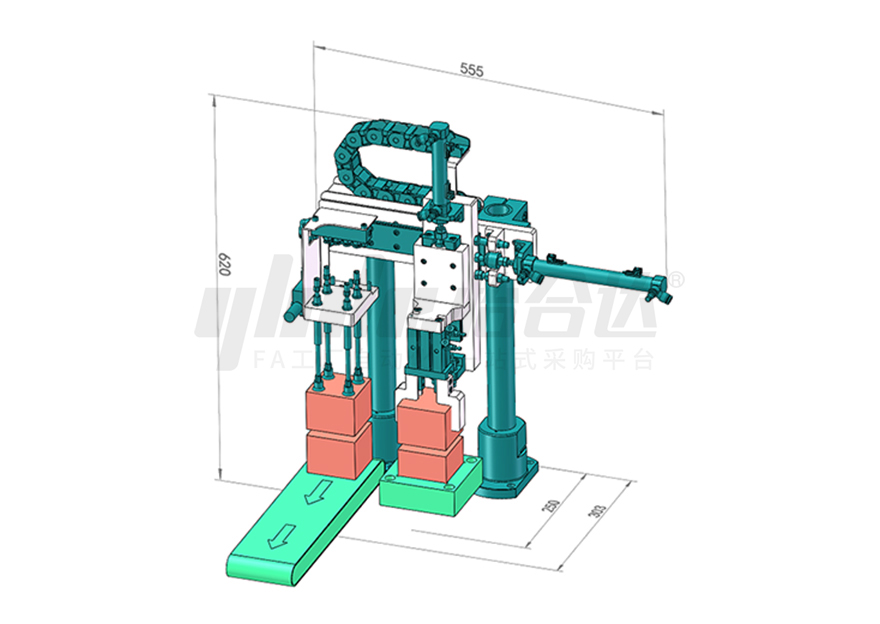
| 动作流程: | 1.三倍行程伸缩机构伸出到位(A空间取料位置)取工件。 | |
| 2.三倍行程伸缩机构缩回到位(A空间入口位置) | ||
| 3.单轴机器人右移到位(B空间入口位置) | ||
| 4.三倍行程伸缩机构伸出到位(B空间放料位置)放工件。 | ||
| 5.三倍行程伸缩机构缩回到位(B空间入口位置) | ||
| 6.单轴机器人左移到位(A空间入口位置) | ||
| 7.往复以上流程。 | ||
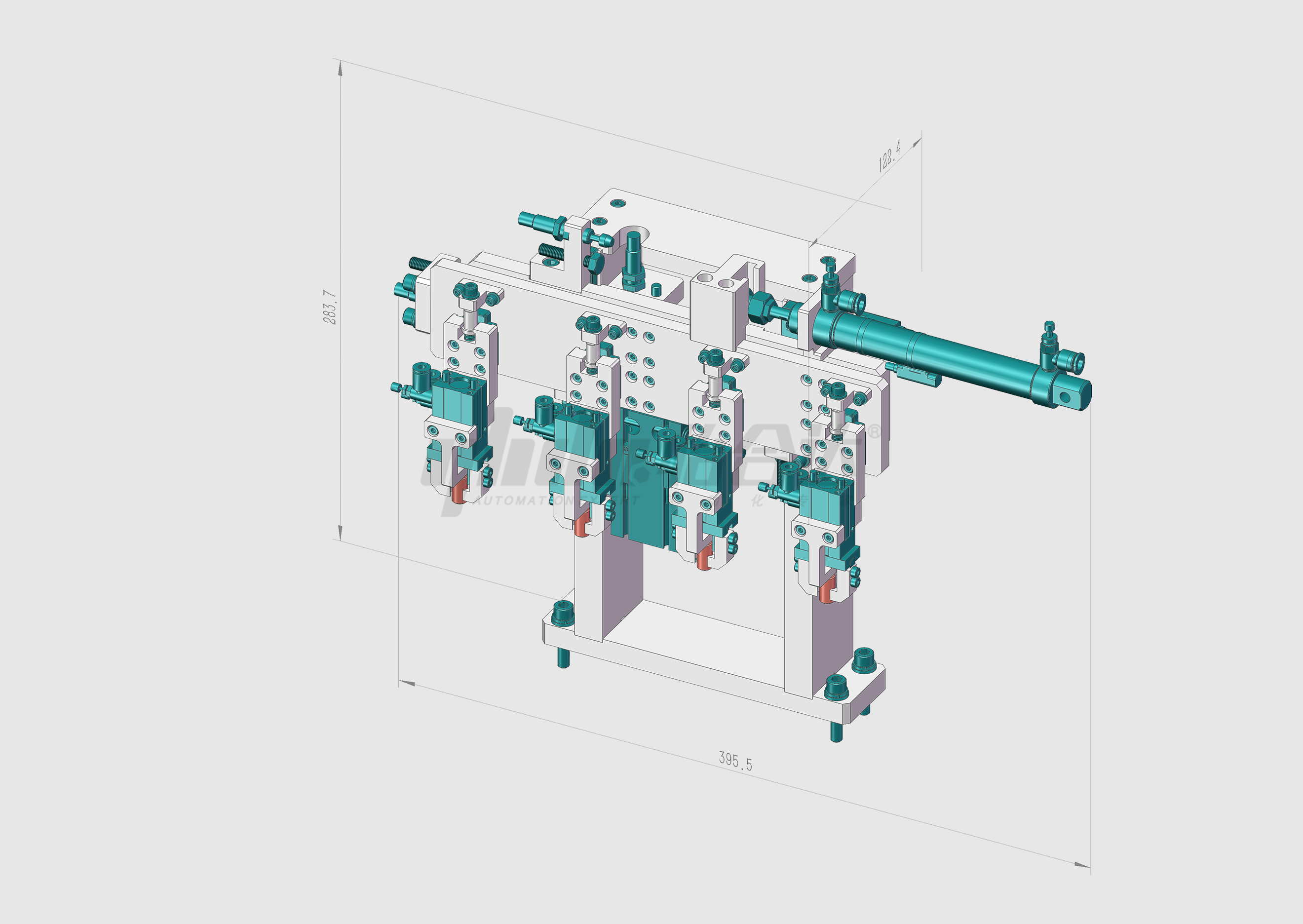
| 二、结构参数 | ||
| 外形尺寸: | L1750x W1150xH425(mm) | |
| 通用性: | 适用于制造业、物流、制造业搬运和堆垛物料 | |
| 循环周期: | 5-10(s) 不同使用场景速度可调 | |
| 精度: | ±0.3/200(mm) | |
| 三、示例应用 | ||
| 工件形状: | 其它形状 | |
| 工件尺寸: | 80X60X14(mm) | |
| 工件类型: | 3C | |
| 总行程: | 510(mm) | |
| 工件重量: | 0.5(Kg) | |
| 负载重量: | 3.63(Kg) | |
| 电源: | AC220V 50Hz / DC24V | |
| 四、计算过程 | ||
| (主要标准件选型计算) | ||
| 重力加速度: | g=9.8(m/s²) | |
| 负载率: | η=50% | |
| 摩擦系数: | μ=0.5 | |
| 机械效率: | η1=0.98 | |
| 半径: | r≈0.008(m) | |
| 传动比: | i≈1/0.83 | |
| 最高速度: | v=40(mm/s) | |
| 加速时间: | t=0.15(s) | |
| 所需扭矩: | T=[M*(v/1000/t)+Mug]*r/η1/i/η=[3.63*(40/1000/0.15)+3.63*0.5*9.8]*0.008/0.98/(1/0.83)/0.5≈0.26(N.M) | |
| (整体设计工况计算) | ||
| 57CM26 扭矩=2.3(N.M) | ||
| 案例所需扭矩为0.26N,实际扭矩为2.3N, 因此符合当前设计要求。 | ||