下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

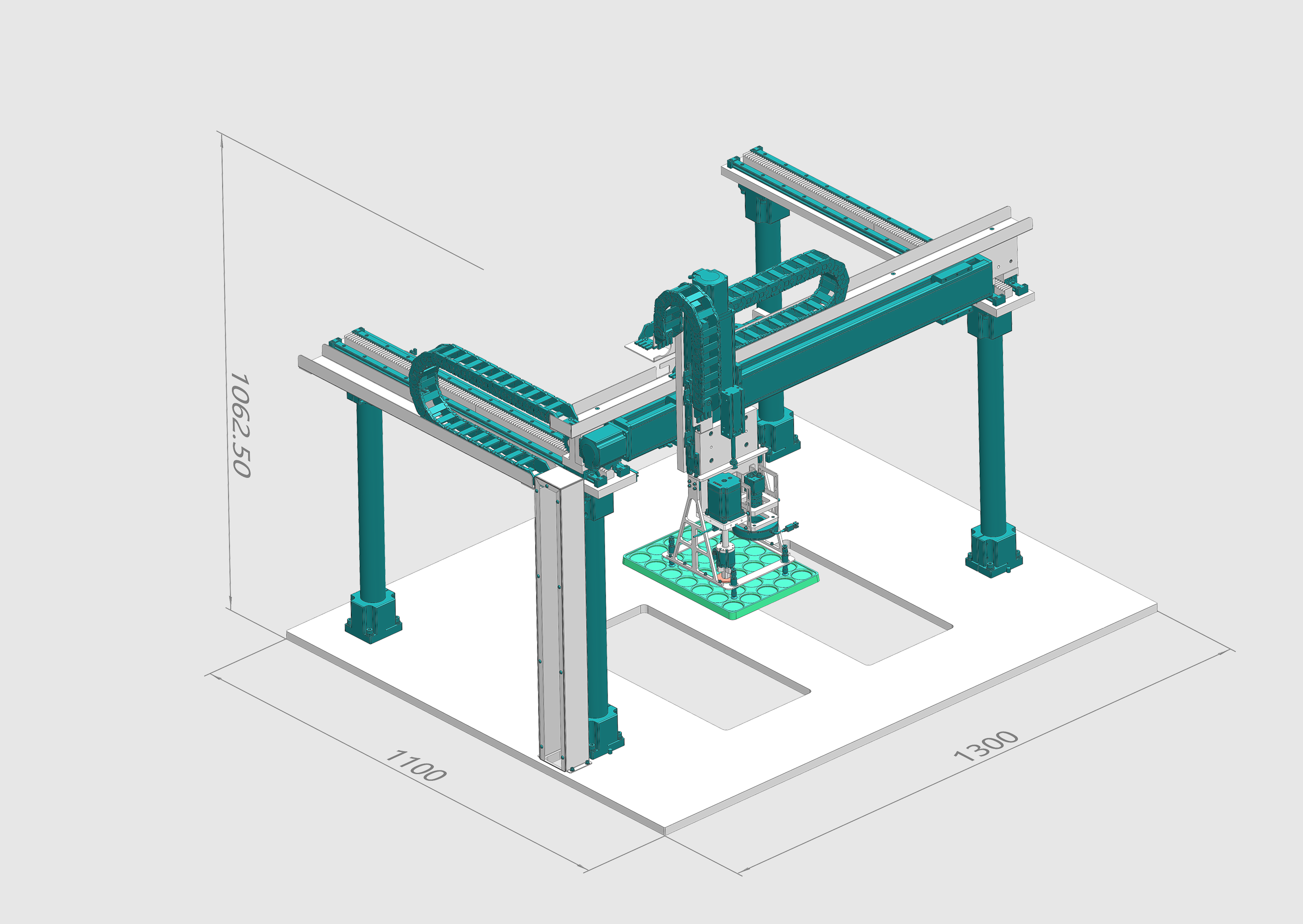
| 一、设计思路 | |
| 设计目的: | 自动粘松香、浸锡、取放工件。 |
| 设定场景: | 粘松香、浸锡 |
| 动作流程: | 1.皮带线工件流入到位 |
| 2.上下升降机器人下降到位取工件 | |
| 3.强磁气缸下降到位 | |
| 4.上下升降机器人上升到位 | |
| 5.左右移动机器人右移至粘松香位 | |
| 5.松香槽气缸上升到位 | |
| 6.上下升降机器人下降到位粘松香 | |
| 6.刮锡渣左右气缸左伸到位 | |
| 7.上下升降机器人上升到位 | |
| 7.松香槽气缸下降到位 | |
| 7.刮锡渣上下气缸下降到位 | |
| 8.左右移动机器人右移至浸锡位 | |
| 8.刮锡渣左右气缸右缩到位 | |
| 9.上下升降机器人下降到位浸锡 | |
| 10.上下升降机器人上升到位 | |
| 10.刮锡渣上下气缸上升到位 | |
| 11.左右移动机器人左移至出料轨道位 | |
| 12.上下升降机器人下降到位, | |
| 12.强磁气缸上升到位,工件放置轨道 | |
| 12.上下升降机器人上升到位 | |
| 13.轨道推料气缸把工件往下工序推出 | |
| 13.左右移动机器人右移至皮带线位 | |
| 14.轨道推料气缸返回原位 | |
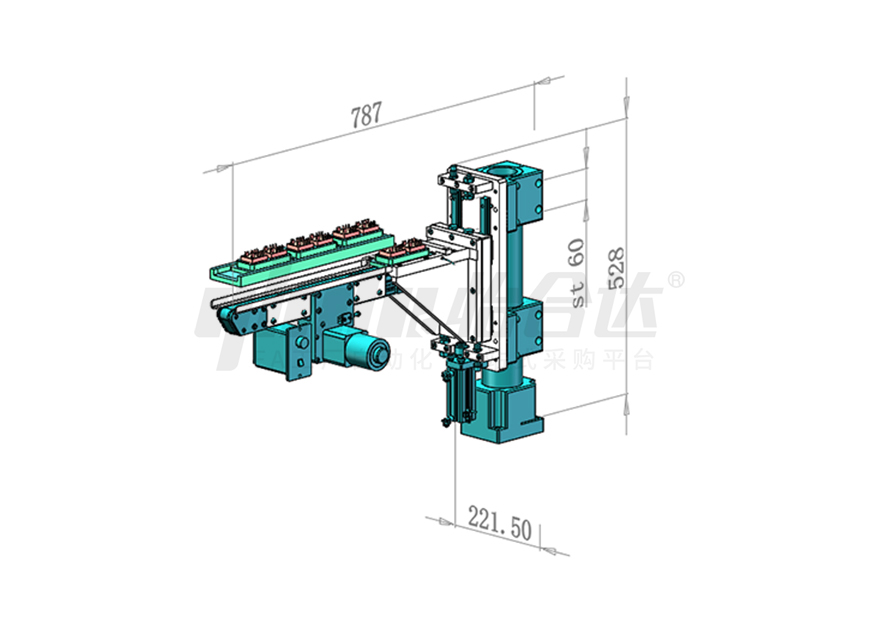
| 二、结构参数 | |
| 外形尺寸: | L800x W800 xH679(mm) |
| 通用性: | 适用于相同尺寸的各种工件 |
| 循环周期: | 5(s) |
| 精度: | ±0.02/300(mm) |
| 三、示例应用 | |
| 工件形状: | 方形 |
| 工件尺寸: | 16x 12.5x 18.5(mm) |
| 工件类型: | 3C |
| 工件重量: | 产品≈4.7(g) 10个产品≈47(g) |
| 负载重量: | 横移 / M≈7.3(Kg) 升降 / M≈1.3(Kg) |
| 气源: | P=0.5(MPa) |
| 电源: | AC220V 50Hz / DC24V |
| 四、计算过程 | |
| (主要标准件选型计算) | |
| 以下参考怡合达FA工厂自动化零件 选型技术资料 | |
| YBSC12-10-400-BC-T-10-N-C-4 前后移动单轴机器人 负载30Kg | |
| YABS6-5-100-BC-T-10-B-3 上下升降单轴机器人 负载8Kg | |
| (整体设计工况计算) | |
| 左右移动30Kg>7.3Kg 上下升降8Kg>1.3Kg | |
| 案例所需负载为7.3Kg,实际负载为30Kg,因此符合当前设计要求。 | |