下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

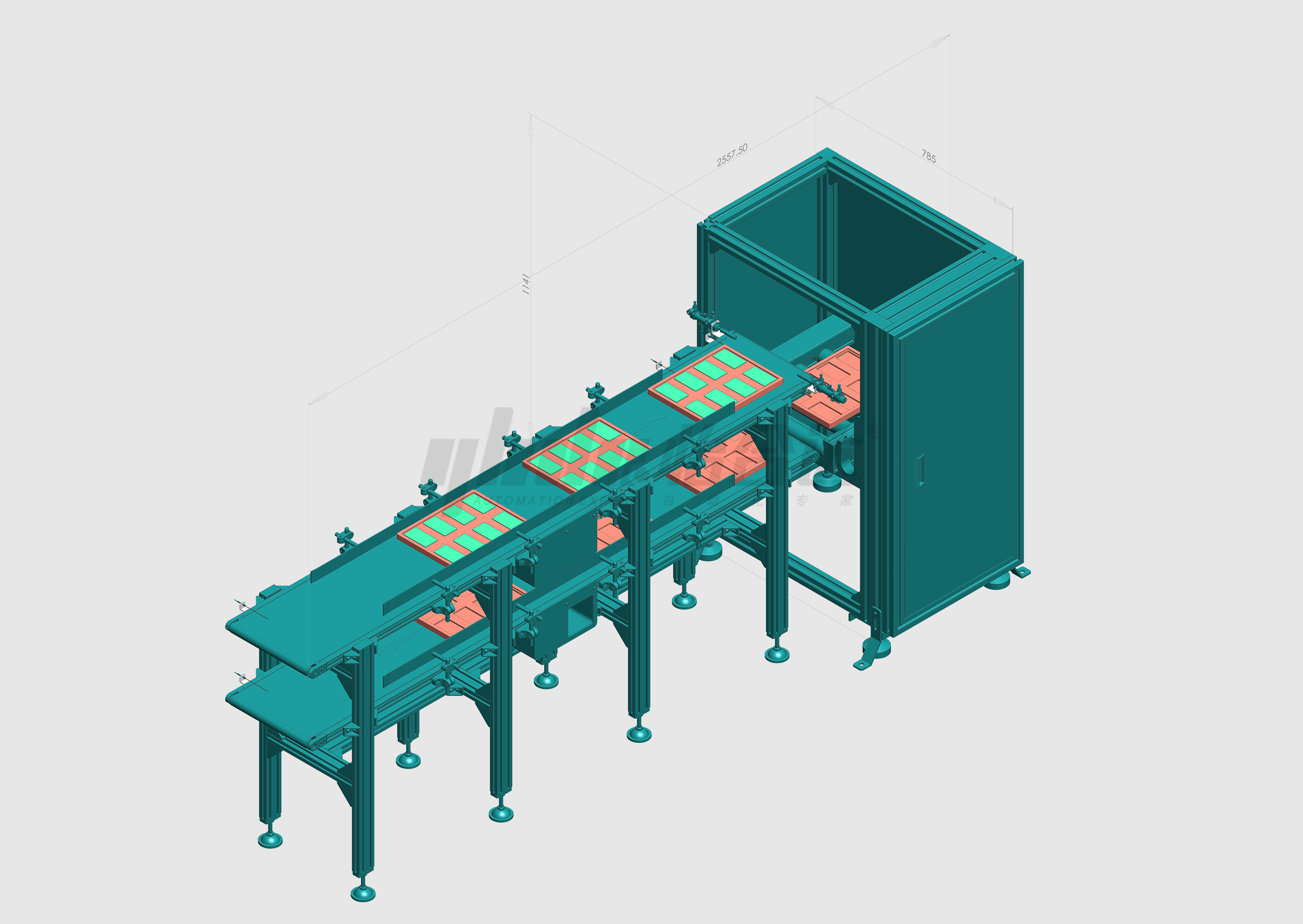
| 一、设计思路 | |||
| 设计目的: | 将并联的两个所有产品工艺相同的转盘,同步交叉上料、下料,效率提高1倍 | ||
| 设定场景: | 用于测试、组装、点胶、焊锡、包装、镭射等场景 | ||
| 动作流程: |
1.转盘1工件下料工位和转盘2工件上料工位各自旋转到单轴机器人模组取放位置 |
||
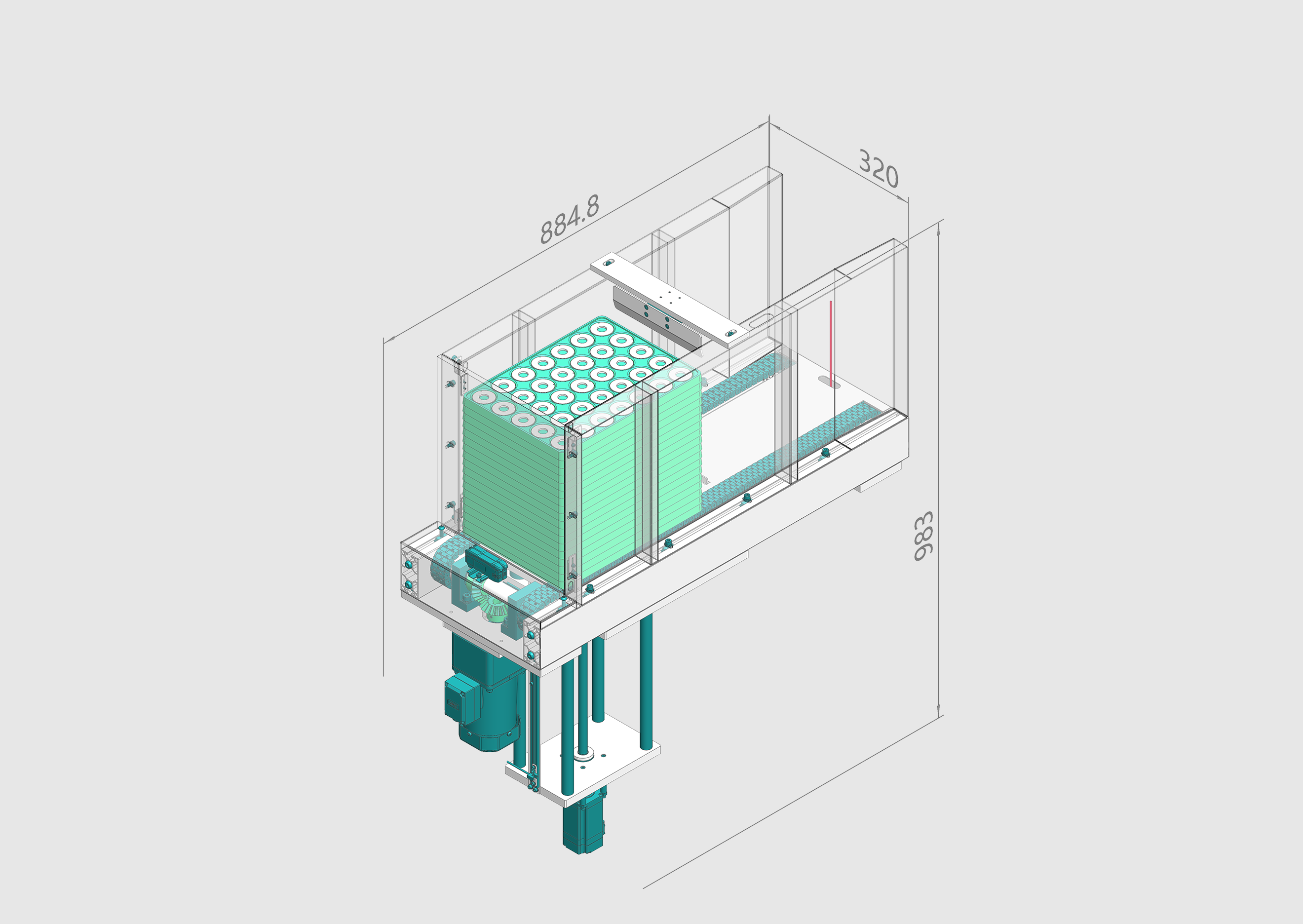
| 二、机构参数 | |||
| 外形尺寸: | L1460 x W600 x H866(mm) | ||
| 通用性: | 适用于相同高度、宽度及不同长度的各种工件治具 | ||
| 循环周期: | 3(s) | ||
| 精度: | ±0.02/300(mm) | ||
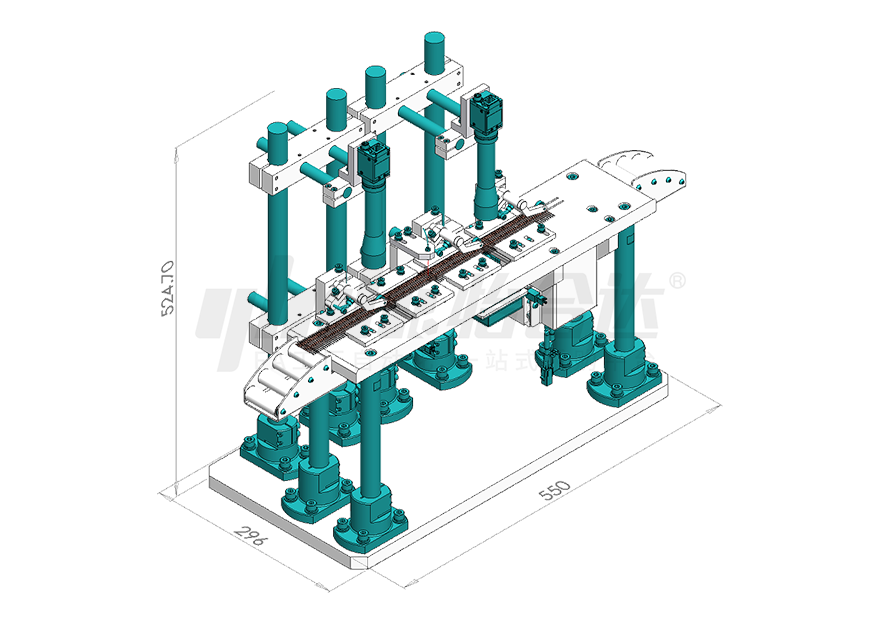
| 三、示例应用 | |||
| 工件形状: | 方形 | ||
| 工件尺寸: | 18 x 12 x 11.9(mm) | ||
| 工件类型: | 3C | ||
| 工件重量: | 产品=13.35(g) | ||
| 负载重量: | M1=5.3(Kg) | ||
| 气源: | P=0.5(MPa) | ||
| 电源: | AC220V 50Hz/DC24V | ||
| 四、计算过程(闭环步进电机选型) | |||
| 步骤 |
参数
|
取值
|
注解
|
| 1、已知条件 |
生产节拍(时间/生产量)
|
3
|
电机直驱
 |
|
工位停顿时间(s)
|
0.5
|
||
|
工位数
|
8
|
||
|
选择分割器工位数s(需≥8)(表2)
|
8
|
||
| 2、确定分度时间和分度角 |
分度时间(s)
|
2.5
|
|
|
最大分度角(°)
|
300
|
需选择分度角≤300°
|
|
|
选择分度角θ(°)
|
90
|
|
|
| 3)转矩与选型 |
分割器输入轴转速n0(r/s) | 20 | |
| 凸轮曲线类型 | 修正正弦曲线 | 多用修正正弦曲线 | |
| 最大加速度Am | 5.53 |
查询表1
|
|
| 最大扭力系数Qm | 0.99 |
查询表1
|
|
| 输出轴最大角加速度α(rad/s2) | 7.721 |
72πAm/s*(n0/θ)2
|
|
| 负载(含转盘)惯量J(kg.m2) | 0.265 | 在SW中查惯性张量 | |
| 分割器输出轴惯性转矩Tj=Jα(N.m) | 2.046 | Tj=Jα | |
| 转矩安全系数K | 2 | ||
| 负载转矩Te=KTj(N.m) | 4.092 | 0.42 kgf.m | |
| 凸轮输入轴转矩Tc(N.m) | 2.026 |
Tc=Qm(360/s/θ)Te
|
|
| 电机型号 | YK130HB280-07A |
表3
|
|
| 凸轮分割器型号 | ZLF07-4-270 | 表2 | |
| 凸轮分割器静扭矩(kgf-m) | 32.3 |
查询表2
|
|
| 电机保持扭矩 | 37 |
校验合格
|
|
| 凸轮分割器输出转矩 | 13.4 |
校验合格
|
|
| 校验格 | 公式格 | 选项格 | 型号格 | ||||
| 注:选型计算&公式可在bom表的技术文档中查看 | |||||||