下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

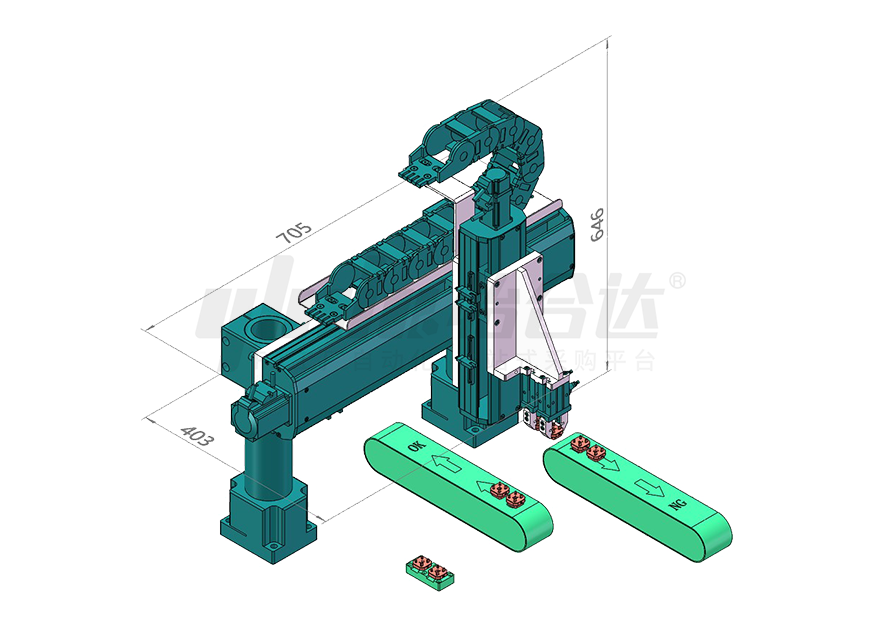
| 一、设计思路 | |||
|
设计目的: |
密封圈自动分料、上料 | ||
| 设定场景: | 密封圈装配场景 |
||
| 动作流程: | 1、密封圈经直振料到进入分料装置 | ||
| 2、光纤传感器感应密封圈到位 | |||
| 3、四指夹爪夹具下降,通过夹指(夹爪气缸缩回)初步撑大密封圈 | |||
| 4、四指夹爪夹具上升,移栽到需求装配密封圈样品上方,移栽过程中并行四指夹爪气缸张开,夹具撑开进一步撑大密封圈 | |||
| 5、四指夹爪夹具下降,脱料板推出密封圈,使密封圈进入卡槽内 | |||
| 6、四指夹爪上升、回位,循环以上动作 | |||
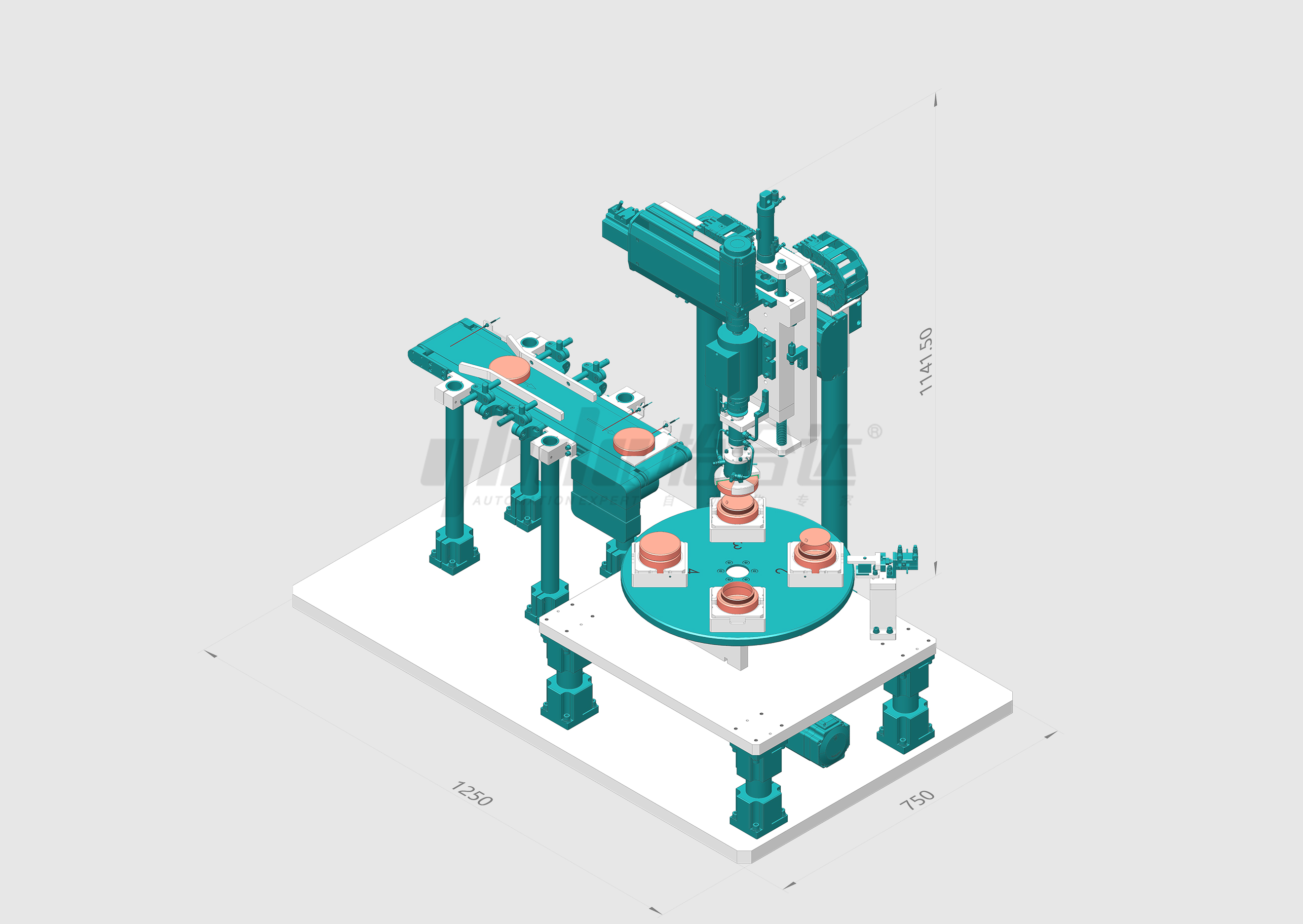
| 二、机构参数 | |||
| 外形尺寸: | L1000xW800xH480(mm) | ||
| 通用性(单个样品负载): | 内径7.5mm,线径2mm密封圈 | ||
| 循环周期: | 3(S) | ||
| 精度: | ±0.1(mm) | ||
| 三、示例应用 | |||
| 工件形状: | 圆环形状 | ||
| 工件尺寸: | 内径x线径:φ7.5x2mm | ||
| 工件重量: | 0.1(g) | ||
| 使用气压: | P=0.5(MPa) | ||
| 电源: | AC220V 50Hz/DC24V | ||
| 四、计算过程 | |||
| 注:选型计算&公式可下载技术文档进行详细查看 | |||
| 【主要标准件选型计算】 | |||
| 1)、移栽机械手选型 | |||
| 四指夹爪: | 以下参考怡合达FA工厂自动化零件 选型技术资料(技术文档表1) | ||
| NIQ63-33-4 张开力是370N,闭合行程4mm | |||
| 整体设计工况计算 | |||
| 根据实际测试情况,370N满足撑大密封圈使用要求 | |||