下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

| 一、设计思路 | |||
|
设计目的: |
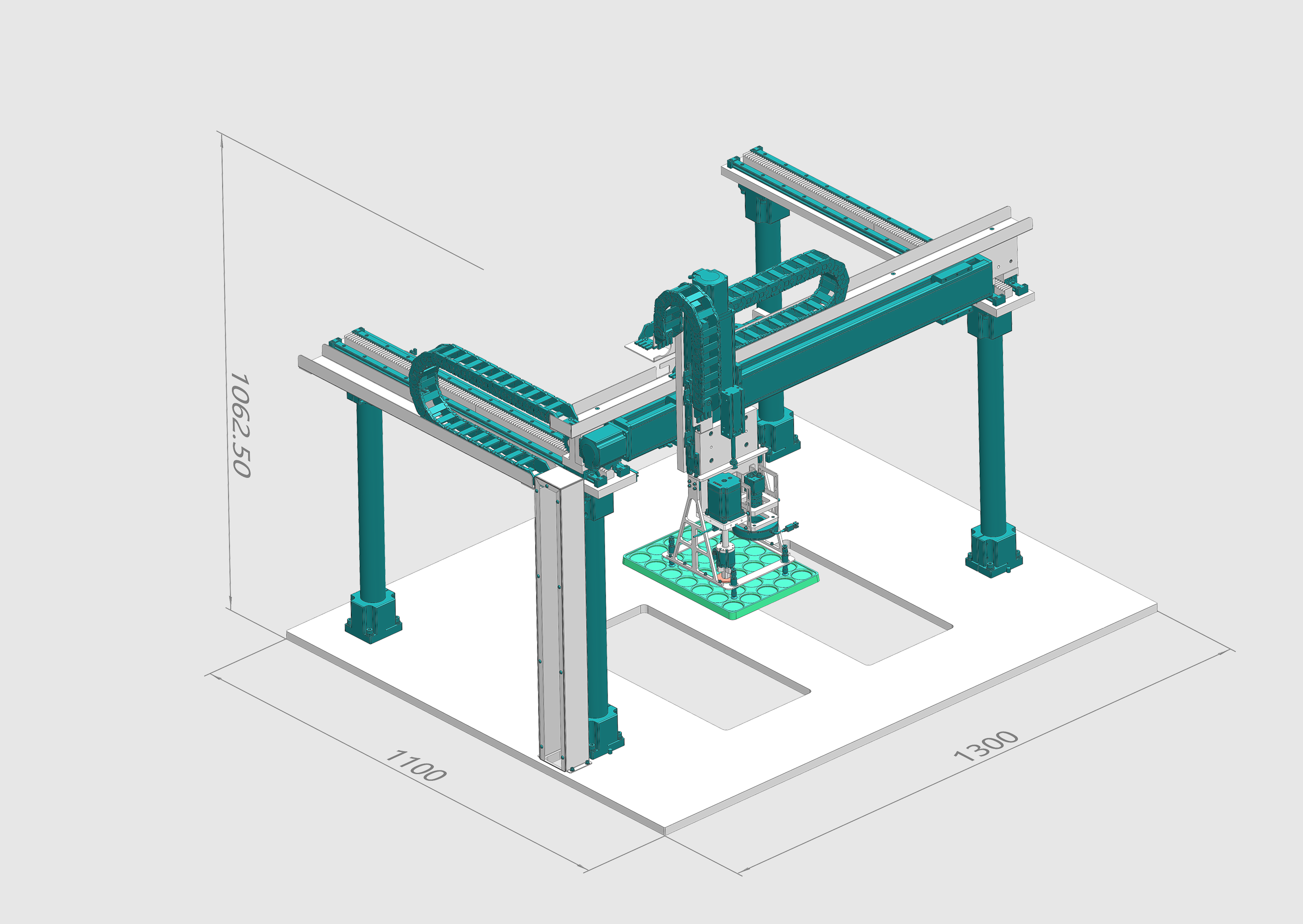
此结构带有XYZ三轴驱动和旋转拍照补正,可实现2组1出2的功能,此结构可提高供料效率 | ||
| 设定场景: | 适用于一出多组物料的场景 | ||
| 动作流程: |
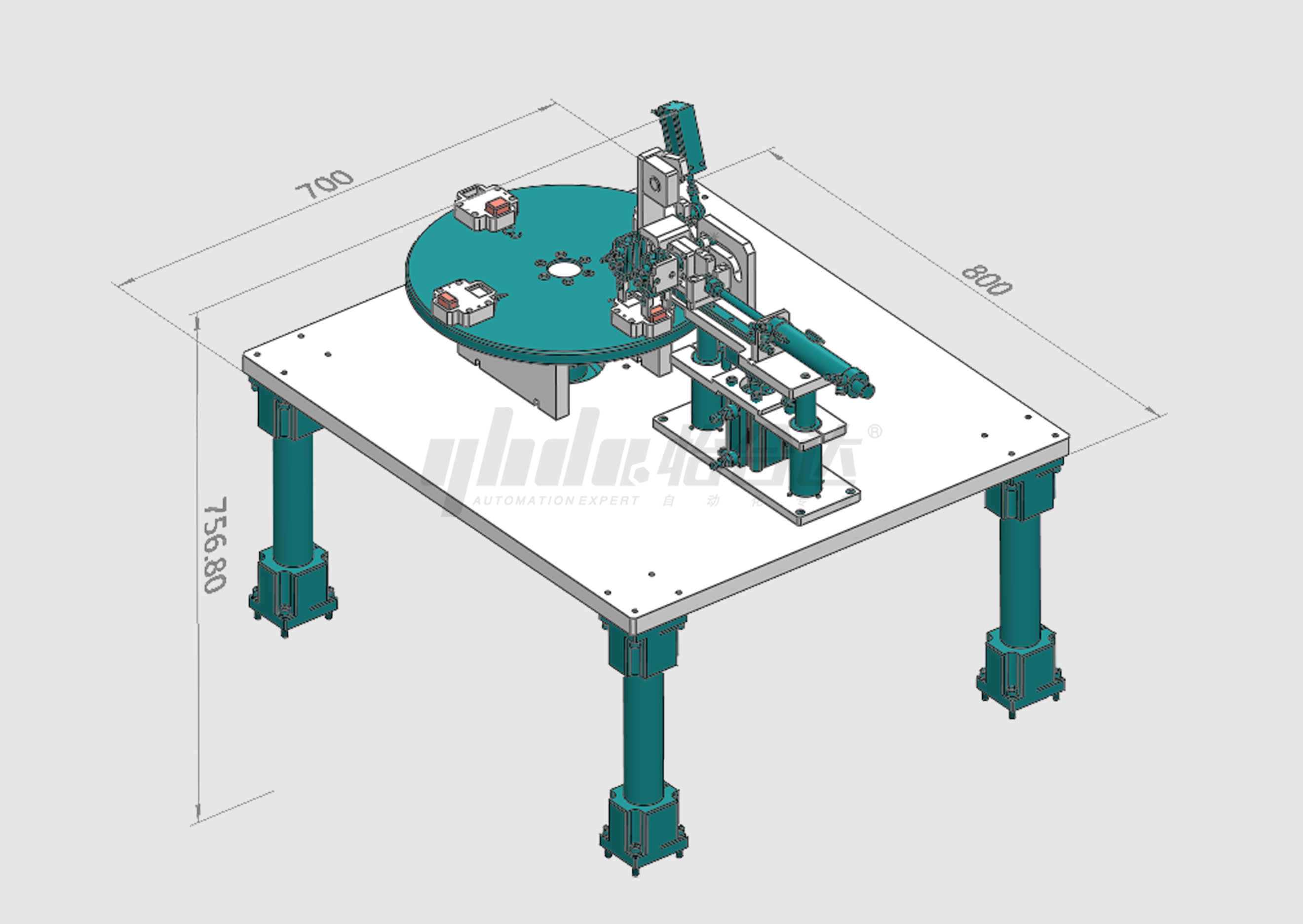
1、第一组:振动盘&直振器供料到位 | ||
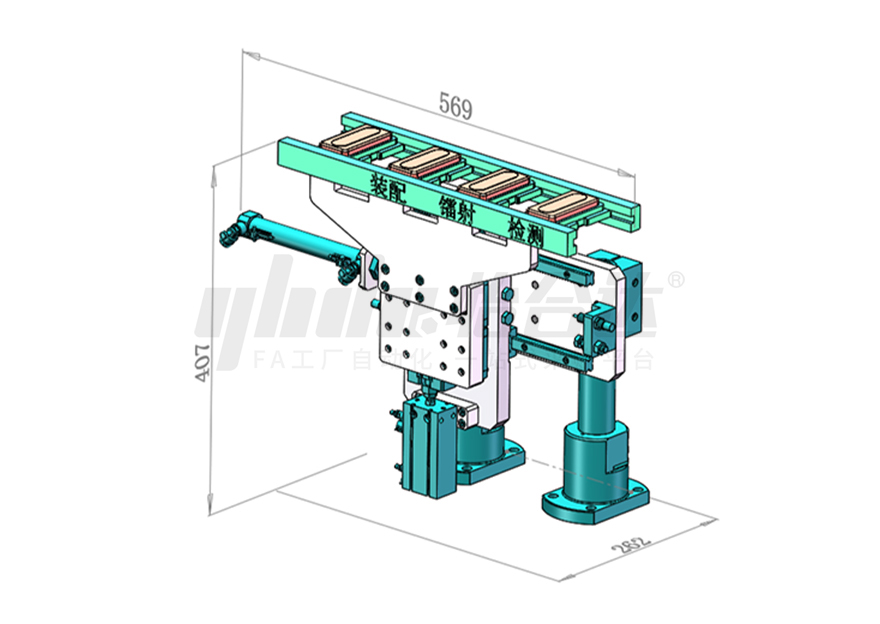
| 2、翻转夹持机构下降,夹持工件 | |||
| 3、夹持工件上升,Y向气缸前推,下降放工件 | |||
| 4、松爪,上升,Y向气缸缩回,下降,抓工件 | |||
| 5、夹持工件上升,Y向气缸前推,X向气缸侧推,下降,放工件 | |||
| 6、上升,X、Y,Z气缸缩回,下降 | |||
| 7、第二组:夹持工件,上升,电机旋转90度拍照后补偿,Y向气缸前推,下降放工件 | |||
| 8、松爪,上升,Y向气缸缩回,电机旋转回原位,下降,抓工件 | |||
| 9、夹持工件上升,电机旋转90度拍照后补偿,Y向气缸前推,X向气缸侧推,下降,放工件 | |||
| 10、上升,X、Y气缸缩回,电机旋转回原位 | |||
| 11、重复以上循环 | |||
| 二、机构参数 | |||
| 外形尺寸: | L593.6xW394.5xH902.5(mm) | ||
| 通用性(单个样品负载): | 0~1kg | ||
| 循环周期: | 14(S) | ||
| 精度: | ±0.2(mm) | ||
| 三、示例应用 | |||
| 工件形状: | 圆柱形 | ||
| 工件尺寸: | φ25*45(mm) | ||
| 工件重量: | 0.3(Kg) | ||
| 使用气压: | P=0.5(MPa) | ||
| 电源: | AC220V 50Hz/DC24V | ||
| 四、计算过程 | |||
| 注:选型计算&公式可下载技术文档进行详细查看 |
|||
| 【步进电机选型】 | |||
| 参数 | 公式&注解 | 取值 | |
| 1)、机械结构参数 | |||
| 减速比:: | i | 2 | |
| 电机直驱机械效率: | η0 | 0.95 | |
| 主轮节圆(mm): | d1 | 23 | |
| 从轮节圆(mm): | d2 | 47 | |
| 皮带传动效率: | η1 | 0.95 | |
| 行程(mm): | L | 75 | |
| 倾斜角(°): | θ | 90 | |
| 每分钟往返次数: | N | 8 | |
| 加速时间(s): | t1 | 0.2 | |
| 减速时间(s): | t2 | 0.2 | |
| 静止时间(s): | t3 | 1 | |
| 往返一个周期时间(s): | T=60/N | 7.5 | |
| 负载最大线速(m/s): | Vmax=2*L/(T-2*t4-t1-t3)/1000 | 0.029 | |
| 电机最大转速(r/min): | n0max=Vmax*1000/(π*8)*i*60 |
48.846
|
|
| n0max≤1000,可以使用步进/伺服电机 | |||
| 外力(N): | Fa | 0 | |
| 摩擦系数: | μ | 0.02 | |
| 负载(含平台)总重量(kg): | m1 | 2 | |
| 皮带重量(kg): | m2 | 0.1 | |
| 负载总质量(kg): | m=m1+m2 | 2.1 | |
| 启动加速度(m/s²): | a=Vmax/t1 | 0.15 | |
| 电机轴角加速度(rad/s²): | εm=2*π*n0/(60*t1) | 25.58 | |
| 匀速运动时主带拉力(N): | F=Fa+mg(μcosα+sinα) | 20.58 | |
| 惯性力(N): | ma=m*a | 0.3 | |
| 负载折算到主动轮惯量(kg.cm²): | J3=m(d1/10)²/4/η1 | 2.9 | |
| 主动轮惯量(kg.cm²): | J1 | 0.064 | |
| 从动轮惯量(kg.cm²): | J20 | 0.0042 | |
| 从动轮轮折算到主动轮惯量(kg.cm²): | J2=J20/[(d2/d1)²*η1] |
0.00106 |
|
| 电机轴联轴器惯量(kg.cm²): | J' | 0 | |
| 折算到电机轴惯量(kg.cm²): | J"=(J1+J2+J3)/(i²*η0)+J' | 0.786 | |
| 最大允许惯量比: | X | 5 | |
| 电机转子惯量需大于(kg.cm²): | J=J"/X | 0.157 | |
| 初选电机-电机转子惯量(kg.cm²): | Jm | 0.28 | |
| 初选电机-电机额定力矩(kg.cm²): | Tm | 1.2 | |
| 电机轴负载转矩(N.m): | TL=F*d1/2000/(i*η0*η1) | 0.13 | |
| 电机轴启动(加速)转矩(N.m): | Ts | 0.00273 | |
| 电机转矩安全系数(N.m): | K | 1.2 | |
| 计算电机保持转矩(N.m): | T | 0.16 | |