下载各类工具及设计插件
下载各类工具及设计插件
 使用选型工具
使用选型工具
 收藏各类设计资料
收藏各类设计资料
 发表提问互动
发表提问互动

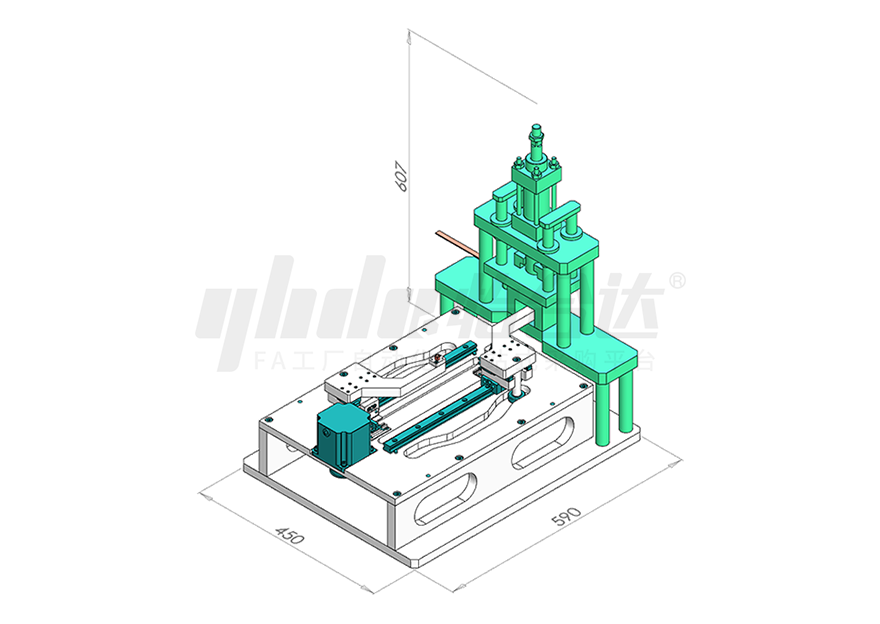
| 一、设计思路 | ||
| 设计目的: | 通用结构,用于四工位等距离夹持搬送 | |
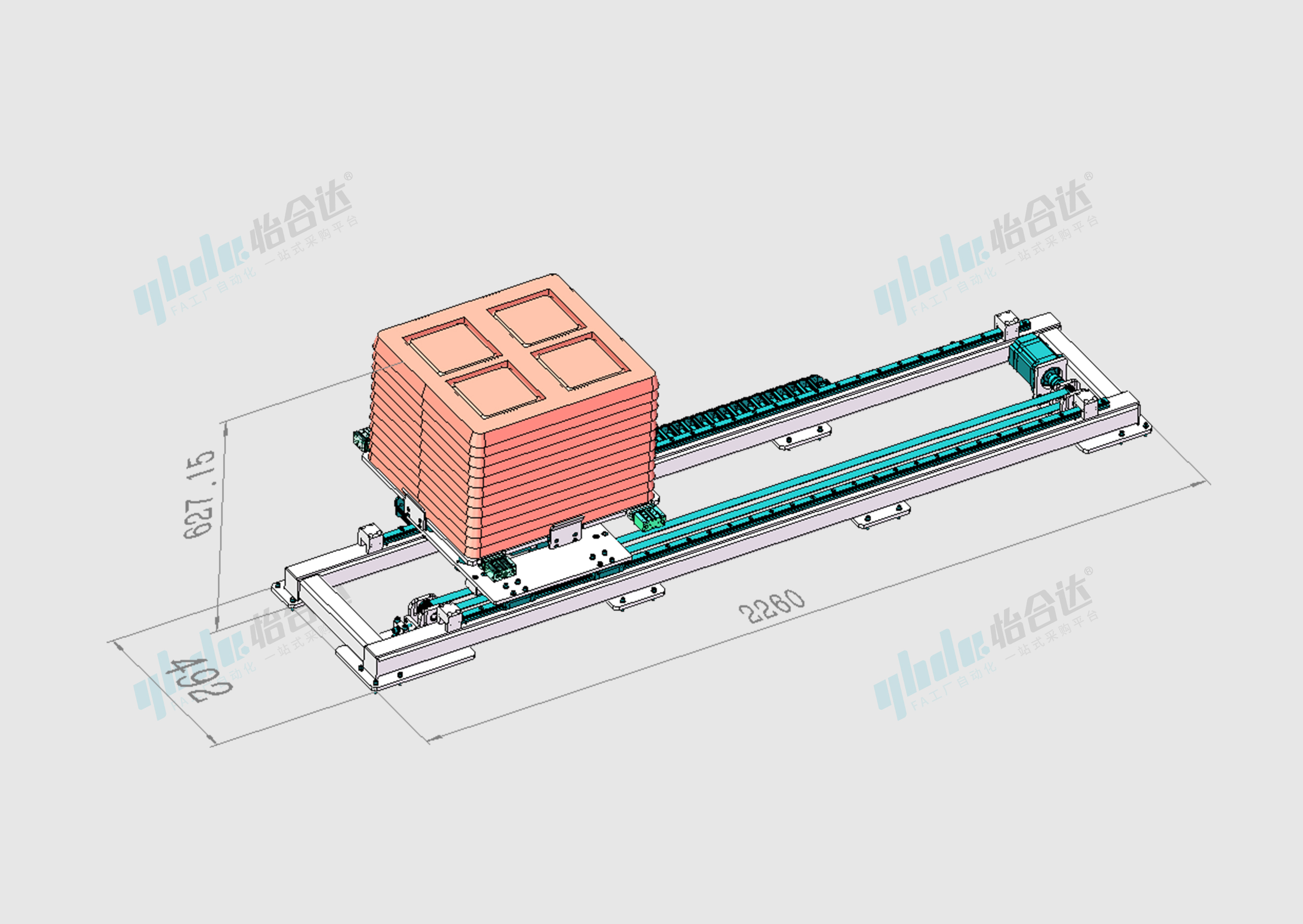
| 设定场景: | 用于多行业使用等距工位搬送,节省工位节拍 | |
| 动作流程: | 1、初始工位下降,到位后,四连爪夹持样品A | |
| 2、夹爪上升,左移到下一工位 | ||
| 3、下降,放置松爪,上升 | ||
| 4、回到原位 | ||
| 5、循环以上流程 | ||
| 二、机构参数 | ||
| 外形尺寸: | L395.4xW122.4xH297.3(mm) | |
| 通用性(可吸附负载): | 0~1.12(kg) | |
| 循环周期: | 8(S) | |
| 精度: | ±0.03(mm) | |
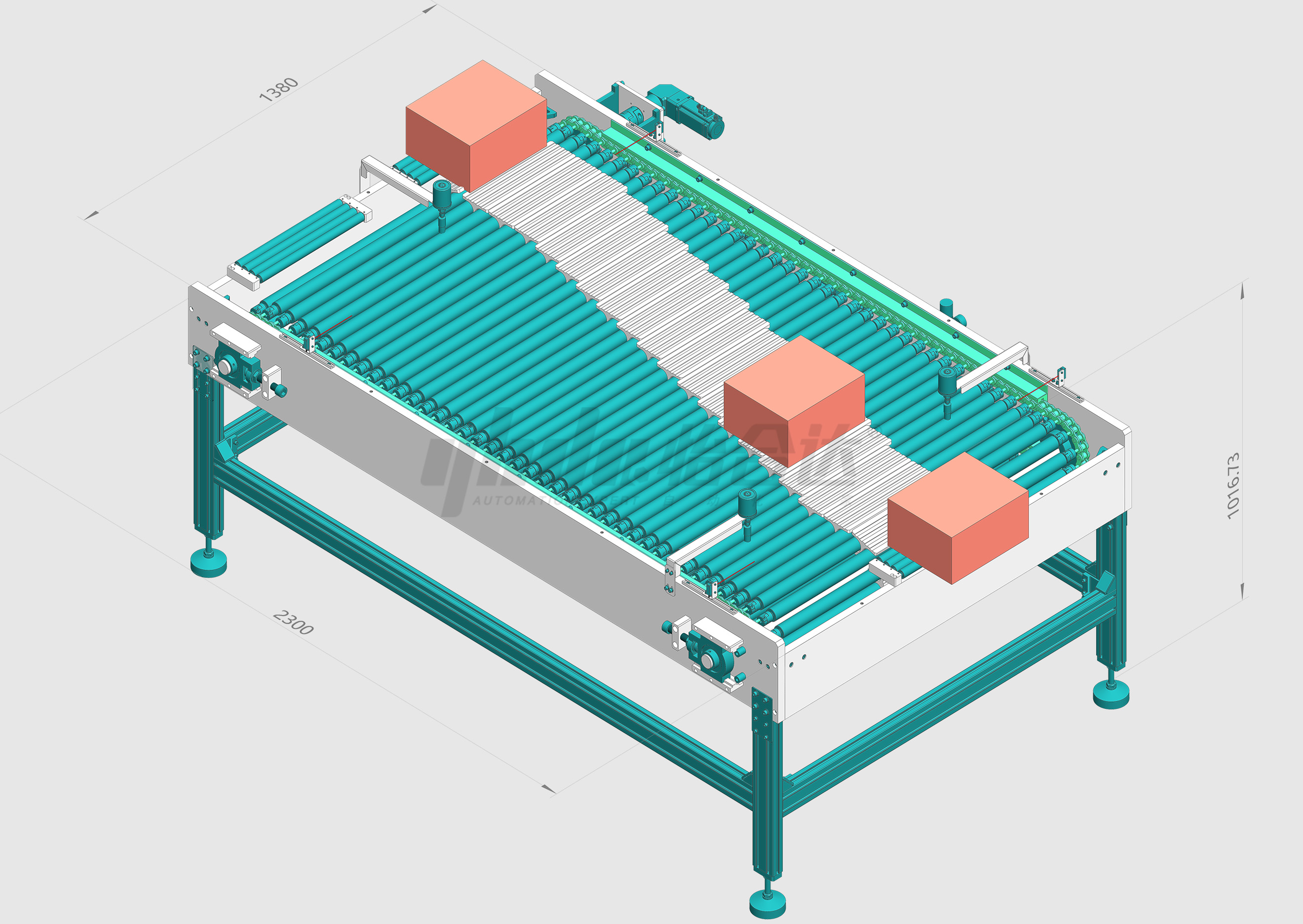
| 三、示例应用 | ||
| 工件形状: | 圆形 | |
| 工件尺寸: | 8*15(mm) | |
| 工件重量: | 5.1(g) | |
| 使用气压: | P=0.5(MPa) | |
| 电源: | 50Hz/DC24V | |
| 四、计算过程(Z向举升气缸) | ||
| 重力加速度: | g=9.8(m/s²) | |
| 实际负载: | F1=70(N) | |
| 负载率: | β=65% | |
| 气缸理论出力: | F2=F1/β=108(N) | |
| 气缸半径的平方: | r²=F2/P/π=68.789(mm) | |
| 理论所需气缸缸径: | D=2r=2*8.29=16.58(mm) | |
| 当前选用Z向举升气缸型号为WGL03-20-30-Y-2 | ||
| 案例所需输出力为108N,实际输出力为154N,因此符合当前设计要求; | ||
| (实际直径20mm>16.58mm,满足需求) | ||